-%E6%AD%A3%E8%89%B2.png)
![]()
Universal Manipulation ExoskeletonLearning Compliant Whole-body Policies
with Real-time Torque Feedback
James (Jingxi) Xu*, 1, 2,
Xinda Qi1,
Yujun Cai1,
Houzhu Ding1,
Luqi Wang1,
Zhixin Sun1,
Jyh-Herng Chow1,
Ming Yang1,
Mark Cutkosky2
1Ant Group,
2Stanford University
*Equal contribution
Teleoperator unsheathing a metal sword relying purely on real-time haptic torque feedback.
Abstract
For robots to work safely in household environments, they need to be compliant and react to torque and force feedback during contact. However, the majority of existing data collection pipelines still lack the ability to capture force and torque data for learning active compliant policies. In this paper, we present Universal Manipulation Exoskeleton (UME), an upper-limb exoskeleton that provides real-time haptic torque feedback while recording whole-arm configurations and joint torque signals for teleoperation. With transparent torque feedback, human operators can even unsheathe kinematically constrained objects while blindfolded. UME is low-cost, lightweight, and portable. Equipped with an embedded IMU, it enables teleoperation for mobile manipulation. With our proposed universal retargeting algorithm, UME can teleoperate a range of robots, including the 7DoF OpenArm, 7DoF Franka, and 6DoF X-ARM. We demonstrate that this combination of capabilities enables learning bimanual, whole-body, and active compliant policies that operate effectively in highly constrained spaces. The learned robust autonomous policies achieve high success rates across a variety of tasks, including long-horizon mobile manipulation, force-mediated box flipping, visually occluded box pushing, and space-constrained tabletop manipulation.
Video
Autonomous Policy Demonstrations
All policies are trained soley on data collected from UME
We study UME's ability to collect data that enables successful learning of autonomous, compliant, bimanual, and whole-body robot policies. All autonomous policies are demonstrated on our in-house-built dual-arm mobile manipulator.
Whole-Body Fridge Drink Retrieval
(Autonomous)
Task Definition: The robot initially faces the table and checks whether a drink can is present. If no drink is detected, the robot turns around, opens the fridge door, picks up a drink from the side holder of the door, transports it while using the other gripper to support the bottom of the can, and places it on the table. If the drink is removed afterward, the robot repeats the same procedure, ensuring that a drink can is always available on the table. Note that the can is unopened and full, not empty.
Challenges: Whole-body mobile manipulation. Long-horizon.
Drink retrieval after the existing one is taken away (4x)
Robustness to disturbance (4x)
Comparison with UMI (2x)
Comparison with No-torque (1x)
Space-Constrained GPU Picking
(Autonomous)
Task Definition: The robot must reach between two desktops to pick up a GPU card located at the back of the constrained space, and retrieve it to a location outside the enclosure.
Challenges: Highly space-constrained. Force-mediated. Requires whole-body movement.
GPU picking from highly constrained space (2x)
Comparison with UMI (2x)
Force-Mediated Box Flipping
(Autonomous)
Task Definition: Push a box against a vertically fixed surface to flip the box upright.
Challenges: Highly force-mediated.
Force-mediated box flipping (1x)
Comparison with No-torque (1x)
Visually Occluded Box Pushing
(Autonomous)
Task Definition: Push a target box into the space between two desktop PCs until it reaches the very end, leaving no gap between the box and any hidden objects behind it. This task is inspired by how humans clean tabletops by shuffling objects all the way against the wall.
Challenges: Visually occluded. Highly force-mediated.
Push the box all the way to the end (1x)
Comparison with UMI (1x)
Universally Teleoperating Other Arms
6DoF X-ARMs (4x)
7DoF Franka Arms in Simulation (4x)
Range of Motion (RoM) & Gravity Compensation
Range of Motion (RoM) (1x)
Gravity Compensation (4x)
Real-time Transparent Torque Feedback
Feeling the Torque Feedback When Blindfolded (1x to 4x)
Unsheathing a Metal Sword Relying on Torque Feedback (1x)
Robot Teleoperation
Dual-arm Teleoperation (1x)
Mobile Base Teleoperation (1x)
Data Collection & User Study
Collecting Mobile Manipulation Demonstrations (4x)
User Study (2x)
BibTeX
@article{liang2026universal,
title={Universal Manipulation Exoskeleton: Learning Compliant Whole-body Policies with Real-time Torque Feedback},
author={Liang, Litian and Xu, Jingxi and Qi, Xinda and Cai, Yujun and Ding, Houzhu and Wang, Luqi and Sun, Zhixin and Chow, Jyh-Herng and Yang, Ming and Cutkosky, Mark},
journal={arXiv preprint arXiv:2606.14218},
year={2026}
}Questions & Answers
What is the cost of UME?
The entire UME system costs $1900. A detailed cost breakdown can be found in the paper.
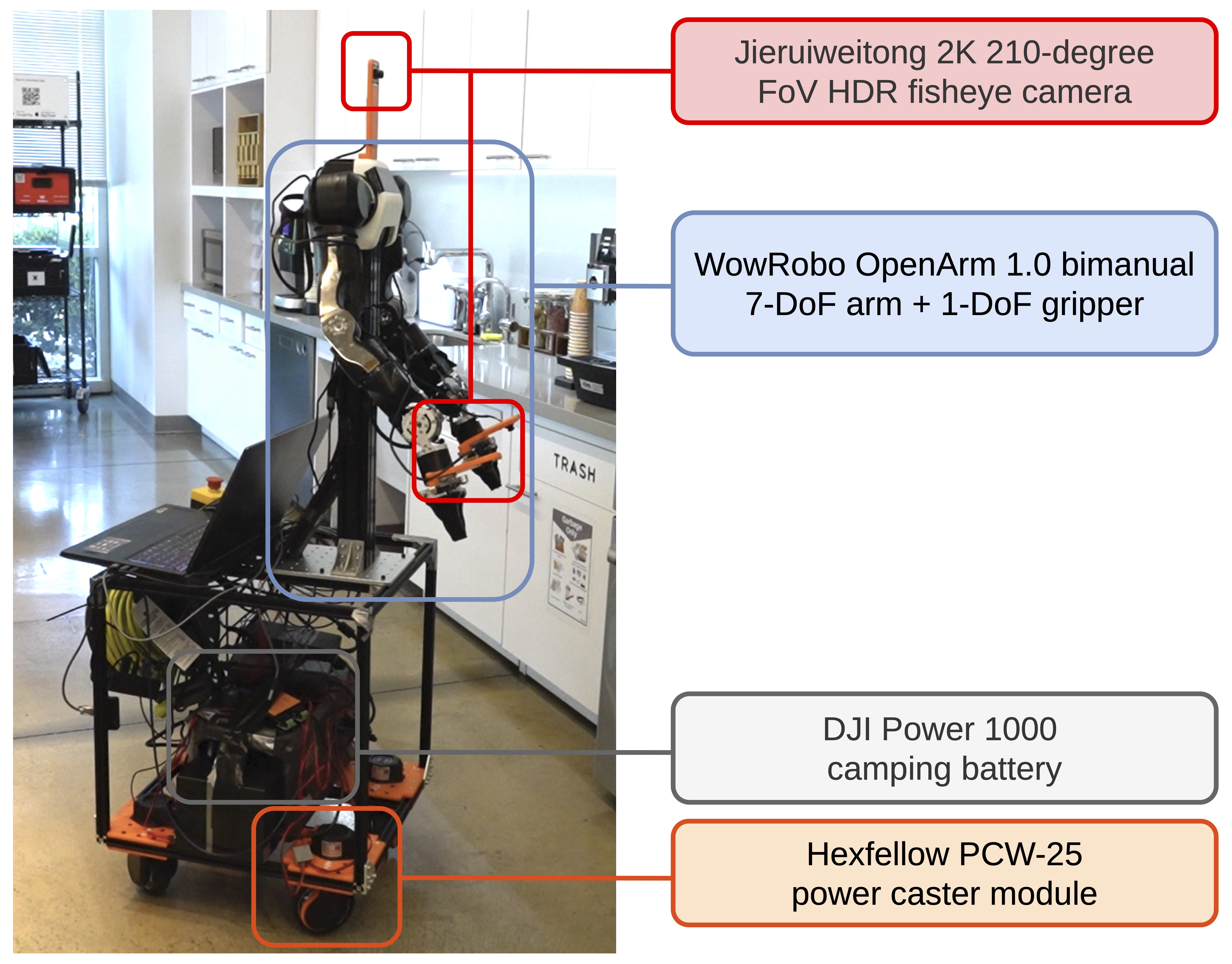
What is the in-house-built mobile manipulator?
We built a low-cost ($9533) in-house mobile manipulator to evaluate UME's capability for collecting demonstrations to learn autonomous mobile manipulation policies. Our mobile manipulation platform uses the OpenArm 1.0 bimanual system made by WowRobo, featuring high-quality Damiao Technology actuators (DM-J8009P, DM-J4340P, DM-J4340, DM-J4310) and machined aluminum components, at a total cost of $5200. The base integrates the Hexfellow PCW-25 powered caster ($900) for improved compliance and precise odometry, while remaining fully holonomic. We use the DJI Power 1000 to supply power to all robot electronics, eliminating the need for a wired wall connection during mobile manipulation. For vision, we employ Jieruiweitong 2K HDR fisheye cameras ($37.5) on the head and wrists, offering wide 210° FoV, low latency, and strong high-dynamic-range imaging.
How many demonstrations did you collect to train the autonomous policies?
Box pushing was trained with 26 demonstrations. Box flipping was trained with 40 demonstrations. GPU picking was trained with 42 demonstrations. Fridge drink retrieval was trained with 157 demonstrations.
Acknowledgement
This work is supported by Ant Group.
We would like to thank Hao Li and Tian-Ao (Teo) Ren from the Stanford BDML Lab for insightful discussions on the mechanical design of UME. We are grateful to Yifan Hou, Zhanyi Sun, and Professor Shuran Song from the Stanford REAL Lab for valuable discussions on autonomous robot experimental design and future applications. We are grateful to Mikael Jorda for feedback on the design of the retargeting algorithm.
We would also like to thank Xiangpeng Miao from Damiao Technology for actuator suggestions and support, Heng Le from X-ARM for assistance with the robotic arms, and Haoxing Guo from Hexfellow Robotics for support with the power caster module.