Why PROJECTCHRONO?
Chrono is a physics-based modelling and simulation infrastructure based on a platform-independent open-source design implemented in C++. A PROJECTCHRONO library can be embedded in a software project to simulate, for instance, wheeled and tracked vehicles operating on deformable terrains, robots, mechatronic systems, compliant mechanisms, and fluid solid interaction phenomena. Systems can be made of rigid and flexible/compliant parts with constraints, motors and contacts; parts can have three-dimensional shapes for collision detection.
There is also a Python version of Chrono,PyChrono.
Chrono is cross-platform, open source, and released under a BSD-3 license.
Applications
- Robotics
- Wheeled vehicle dynamics
- Tracked vehicle dynamics
- Nonlinear finite element analysis
- Mechatronics
- Off-road vehicle mobility
- Terramechanics
- Virtual reality
- Granular flows
- Collision detection
- Autonomous vehicles
- Seismic engineering
- Augmented reality
Features

Multibody dynamics
Run simulations of mechanisms made of rigid bodies. Apply constraint to parts using a wide set of joints. Add motors, linear actuators, springs and dampers. Apply forces and torques.
Finite elements
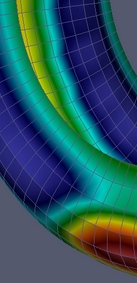
Use the FEA module to create finite elements and model flexible parts. Beams, cables, shells, solid tetrahedrons and hexahedrons. Apply local or distributed loads. Perform non-linear analysis with large deformations.

Vehicle dynamics
Use Chrono::Vehicle to model wheeled or tracked vehicles using a template-based approach. Leverage a wide set of suspension templates. Use various soil and tire models. Add powertrains/drivelines using 1D elements: clutches, brakes, and reducers.

Large scale simulation
Exploit the parallel version of Chrono to simulate large scenarios such as granular flows, vehicle-soil interaction, and fluid-solid interaction. Perform co-simulation with other CFD and FEA software packages.

Collision detection
Define collision shapes using meshes or primitives. Compute frictional contact forces using state-of-the-art collision detection algorithms. Define surface properties and surface families.
Open API design
Chrono is middleware, designed from ground up to be customized and embedded in other simulation software. Plug-in optional modules available for post-processing and real-time visualization. Chrono is cross-platform, open source, and release under a BSD-3 license.