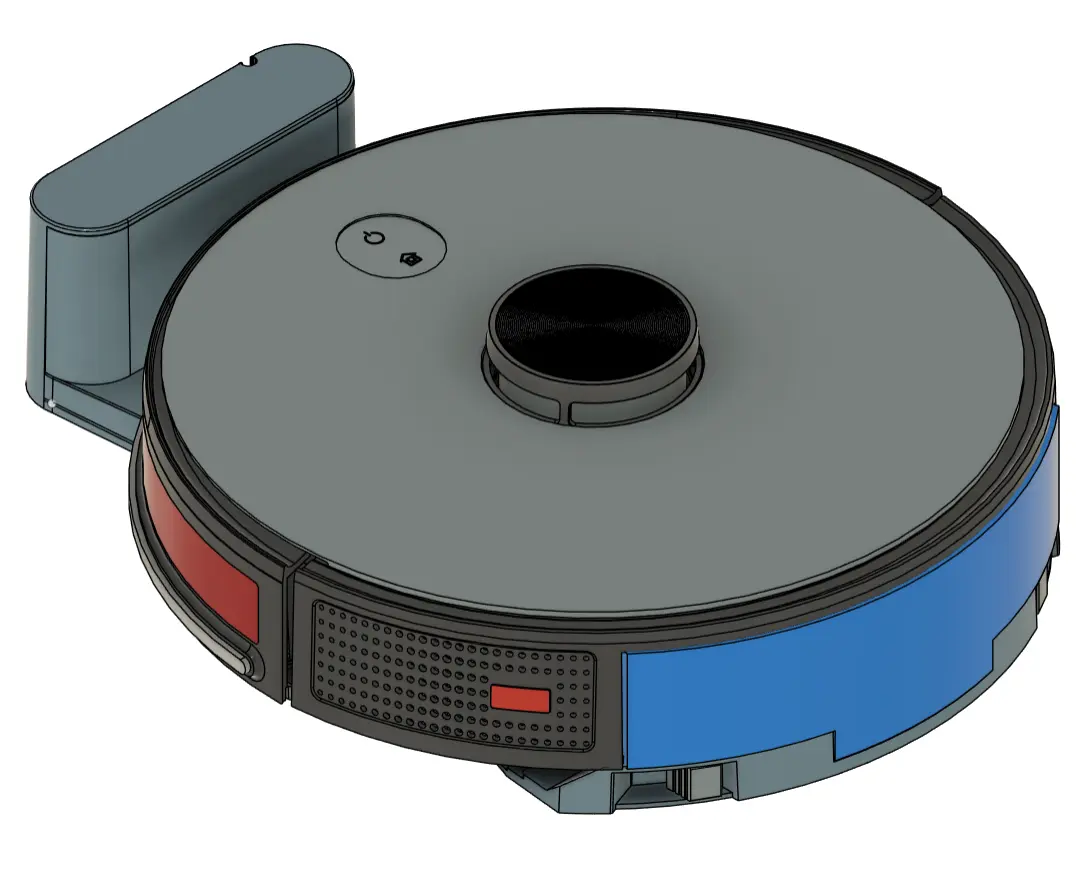
Today I’m kicking off my most ambitious Maker’s Pet project yet: OOMWOO, an open-source home robot vacuum that you can build yourself. Open hardware, open firmware, open software — and built in public, from the first commit.
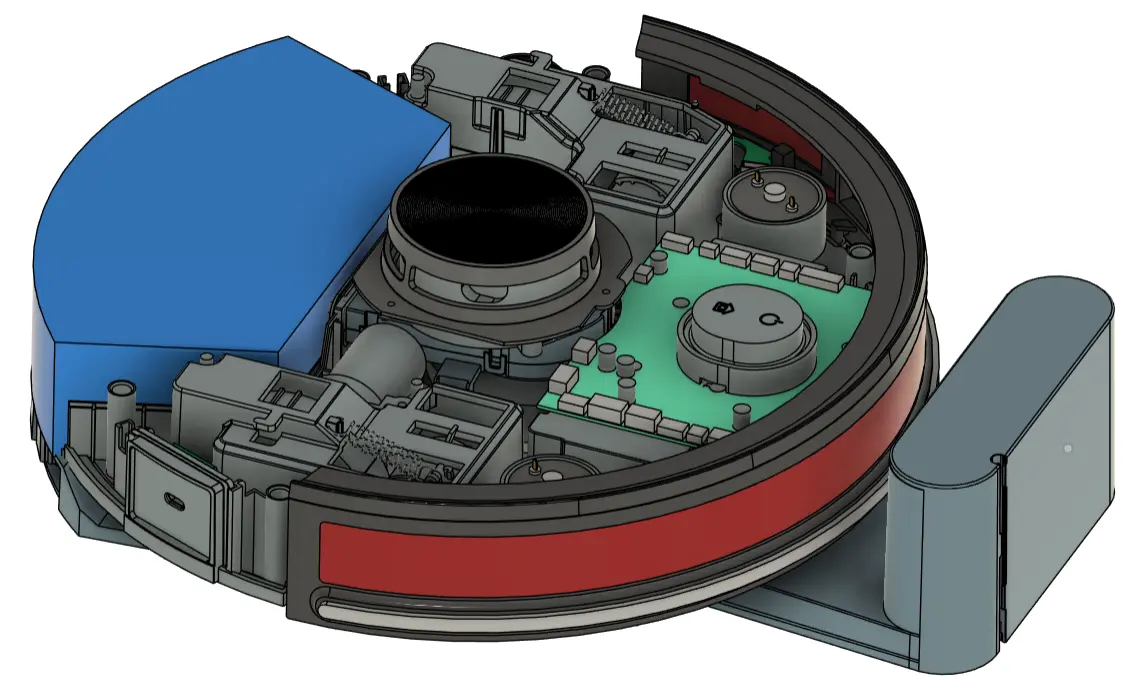
No cloud required. No vendor lock-in. It maps your home with an affordable 2D LiDAR and navigates on its own, runs locally, and integrates natively with Home Assistant. If you’re into making a vacuum that cleans well, Raspberry Pi, ROS 2, 3D printing, or just the idea of owning a vacuum you fully understand and control — this one’s for you.
About the name: “OOMWOO” is a rotational ambigram — it reads the same flipped 180°, just like the robot itself roaming your floor in every direction.
What OOMWOO is
OOMWOO is a build-it-yourself robot vacuum designed for the maker community:
- Affordable and fully open — hardware, software, and firmware
- 2D LiDAR mapping and autonomous navigation with ROS 2 / Nav2
- Native Home Assistant integration for local control
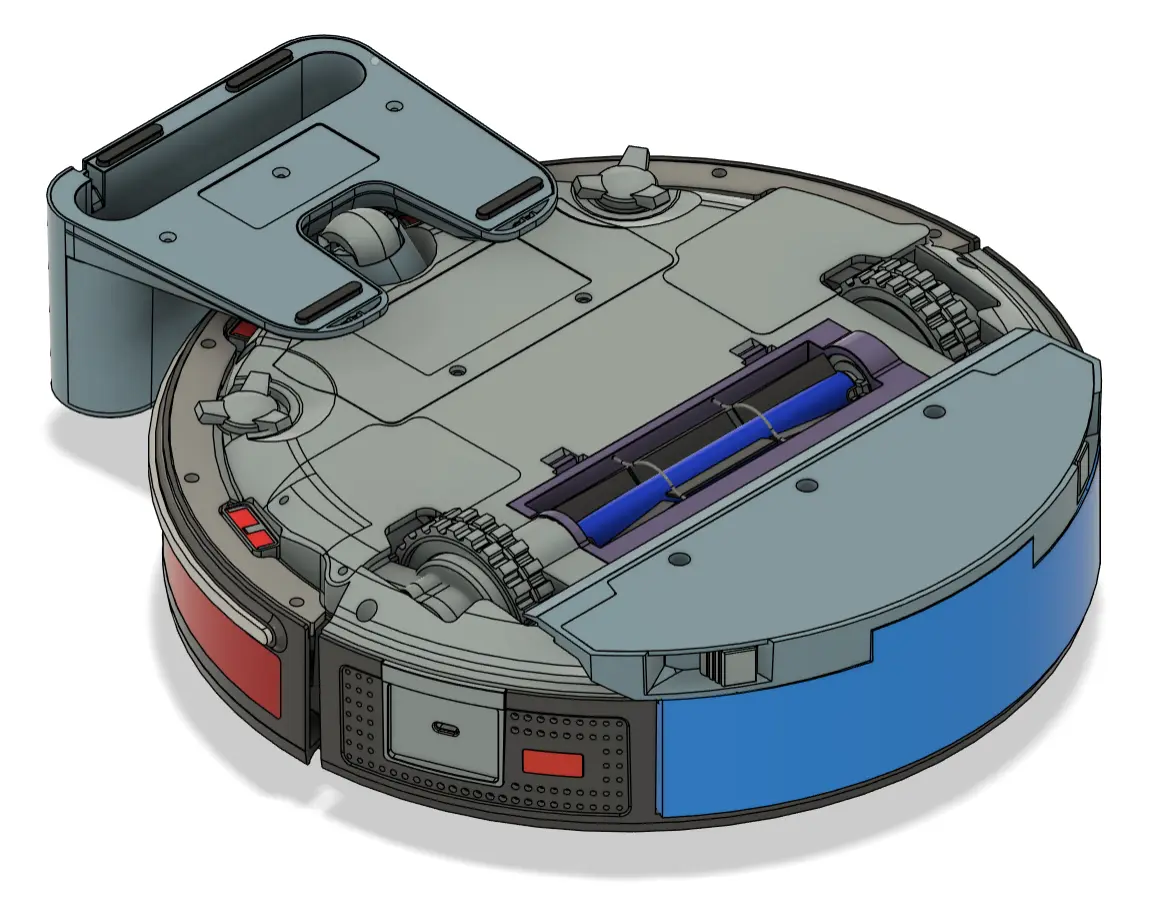
- 3D-printable, documented, hackable chassis
- Local-first — no cloud needed for everyday cleaning, ever
- Home-appliance quality — not a throwaway build
- Step-by-step, zero-to-hero build instructions, with a complete bill of materials so you can source every part yourself
Optional extras — cloud features, and eventually an app store of ROS 2 apps to customize how your vacuum behaves — will layer on top. But the core promise never changes: the vacuum always works cloud-free and local, out of the box.
Where the project is today
This is genuinely early hardware-wise — and that’s the point of building in public. I’m in the process of sourcing key parts at the moment. You can follow my parts sourcing progress here.
Software-wise, the software development environment is ready. You can install it and run OOMWOO (in simulation, no hardware) in, say, 15 minutes. Please follow this tutorial. You can contribute robot software to the project – and test it at home with a real vacuum cleaner – without waiting for the hardware is being developed. How? By using another real consumer vacuum cleaner as a “placeholder”. Please see this, this and this tutorial for instructions.
The first milestone (v0) is a bare-bones, working build:
- 3D-printed chassis
- ROS 2 Gazebo simulation
- LiDAR with manual SLAM
- ROS 2 on a Raspberry Pi 5 and/or ESP32 running micro-ROS (final architecture still being decided)
The open-source deliverables include:
- Bill of materials, early work-in-progress
- 3D-printable files (not available yet)
- Software development environment – ready to use, install today
- Firmware (not available yet)
- A motor-driver and sensor I/O PCB (repo to be announced shortly)
- Build instructions (not available yet)
- Full build-along, bring-up, troubleshooting docs demo videos (not available yet)
Build it with me — massively in parallel
OOMWOO is organized so the community can build it in parallel. The robot and its software are split into self-contained modules (also known as Requests for Contributions). You pick whatever module interests you, work on it whenever you want, and submit your work as a pull request. Multiple people can tackle the same module — the best solution surfaces over time.
Please find the list of Requests-for-Contribution (RFC) here. Here are a few RFC examples:
- Create 3D STEP models of sourced parts — drive wheel assemblies, caster wheel assembly, fans, main brushes and so on
- Map-and-clean — code to perform the first clean while mapping while SLAM-mapping and exploring
- Research specs of sourced parts — many sourced parts lack datasheets, so their specs and electrical interfaces have to be researched and sometimes reverse-engineered
Here is OOMWOO’s main GitHub repo where 3D files will be published.
Follow along
I’ll be sharing progress as they happen:
- GitHub: github.com/makerspet/oomwoo — code, docs, and discussions
- Discord: join the build chat — twice-a-week updates in #general
- YouTube: build-in-public channel
- X: @0OMWO0 — I will be setting it up by mid-July.
Follow OOMWOO build
Open-source robot vacuum community build updates
Parts Kit
Everything about OOMWOO stays open — you can source every part yourself. If you’d rather skip the parts hunt, a convenience kit (motors, PCB, brushes, gaskets, LiDAR) will be available here at Maker’s Pet, from the same maker behind this project. The kit is a convenience, never a requirement.