


![]()
📑 Table of Contents
- 🌟 Overview
- 🚧 Disclaimer
- ⚙️ Notable Features
- 📋 Requirements
- Installation
- 🤝 Contributing
- 🛠️ Hardware
- 🏗️ Architecture
- 📦 Notable dependencies
- 🗺️ Roadmap
- 🔒 License
🌟 Overview
Ubo App is a Python application that provides a unified interface and tools for developing and running hardware-integrated apps.
It offers a minimalistic, yet intuitive UI for end-users to install and interact with developer apps. It is optimized for Raspberry Pi (4 & 5) devices.
Hardware specific capabilities such as infrared send/receive, sensing, LED ring, etc. are supported by Ubo Pod hardware.
It is also possible to DIY your own hardware, see the hardware DIY section below.
Goals
The design is centered around the following goals:
- Making hardware-integarted app development easier
- Offer no-code/no-terminal UI/UX optionsto both developers and end-users of their apps
- Give developers tools to build apps with multi-modal UX
- Leverage tight hardware and software co-development to unlock new potentials
- Let users focus on their app logic while Ubo app handles the rest (hardware abstractions, UI, etc.)
- Hot-pluggable services
- Modular and friendly to AI tool-calling
- Remote API access (gRPC)
If you are willing to supporting other SBCs or operating systems, please consider contributing to the project.
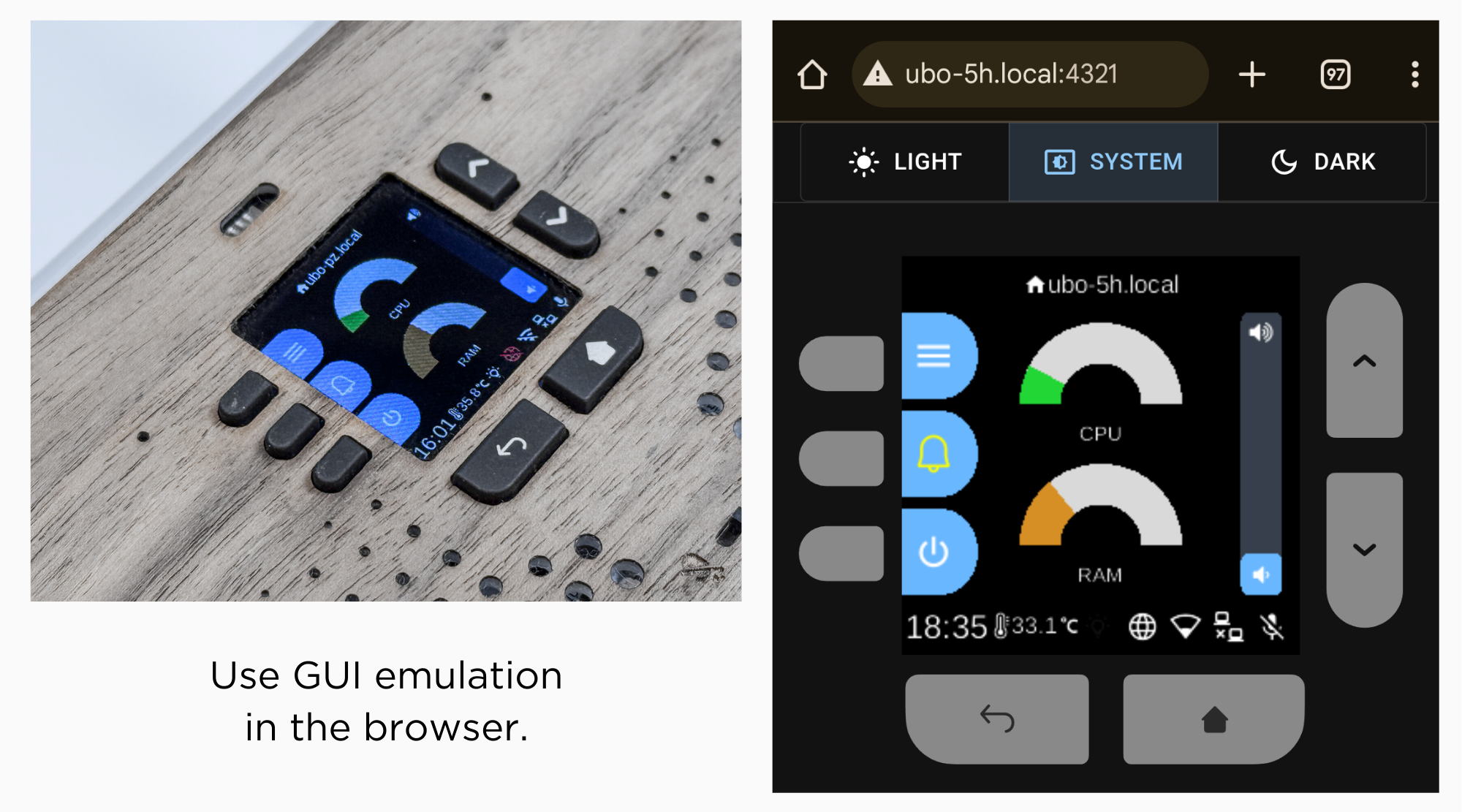
Example GUI screenshots
 )
)
🚧 Disclaimer
Be aware that at the moment, Ubo app sends crash reports to Sentry. Soon we will limit this to beta versions only.
⚙️ Notable Features
- Easy WiFi on-boarding with QR code or hotspot
- Headless (no monitor/keyboard) remote access setup
- SSH
- VS Code tunnel
- Raspberry Pi Connect
- Install and run Dockerized apps headlessly
- One-click install for pre-configured apps
- Access and control basic Linux utilities and settings
- User management
- Network management
- File system operations
- Natural language interactions for tool calling (voice AI) (experimental)
- User-defined short voice commands with regex-style phrase patterns that map utterances to bindable actions
- Web UI
- Infrared remote control (send/receive), including Web UI assignment of registered IR keys to bindable actions
- gRPC API for remote control - find sample clients here
Check roadmap section below for upcoming features.
📋 Requirements
At minimum you need a Raspberry Pi 4 or 5 to run Ubo App.
To run LLM models locally, we recommend a Raspberry Pi 5 with at least 8GB of RAM.
For features that require add-on hardware that is not natively supported by Raspberry Pi (such as audio, infrared rx/tx, sensors, etc), you can:
- Purchase an Ubo Pod Development Kit
- DIY the hardware
- Use only subset of hardware features emulated in the browser
For more details check out the hardware section below.
🙏 Please consider supporting this project by pre-ordering an Ubo Pod Dev Edition on Kickstarter.
The sales proceeds from the hardware will be used to support continued development and maintenance of Ubo App and its open source dependencies.
Note : The app still functions even if some special hardware elements (audio, infrared rx/tx, sensors, etc) are not provided. The features that rely on these hardware components just won't function. For example, WiFi onboarding with QR code requires a camera onboard.
Installation
Pre-packaged image
Ubo Pod ships with a pre-flashed MicroSD card that has the app installed on it by default.
If you don't have it, or you just want to set up a fresh device, then:
- Download one of the images from the release section
- Use Raspberry Pi Images and choose
custom imageto provide the download image file. - Write to the image
- Use the image to boot your Ubo Pod or Raspberry Pi
This is the fastest, easiest, and recommended way to get started with Ubo App.
🙋♂️If this is the first time you are flashing an image for Raspberry Pi, I recommend following the more detailed steps here.
To run the app on bare Raspberry Pi, you can watch this short demo video.
Install on existing OS
If you want to install the image on an existing operating system, then read on. Otherwise, skip this section.
To install ubo, run this command in a terminal shell:
curl -sSL https://raw.githubusercontent.com/ubopod/ubo-app/main/ubo_app/system/scripts/install.sh | sudo bashIf you don't want to install docker service you can set the WITH_DOCKER environment variable to false:
curl -sSL https://raw.githubusercontent.com/ubopod/ubo-app/main/ubo_app/system/scripts/install.sh | sudo WITHOUT_DOCKER=true bashTo install a specific version of ubo, you can set the TARGET_VERSION environment variable to the desired version:
curl -sSL https://raw.githubusercontent.com/ubopod/ubo-app/main/ubo_app/system/scripts/install.sh | sudo TARGET_VERSION=0.0.1 bashNote that as part of the installation process, these debian packages are installed:
- accountsservice
- dhcpcd
- dnsmasq
- git
- hostapd
- i2c-tools
- ir-keytable
- libasound2-dev
- libcap-dev
- libegl1
- libgl1
- libmtdev1
- libzbar0
- python3-alsaaudio
- python3-apt
- python3-dev
- python3-gpiozero
- python3-libcamera
- python3-picamera2
- python3-pip
- python3-virtualenv
- rpi-lgpio
Also be aware that ubo-app only installs in /opt/ubo and it is not customizable
at the moment.
🤝 Contributing
Contributions following Python best practices are welcome.
ℹ️️ Conventions
- Use
UBO_prefix for environment variables. - Use
ubo:prefix for notification ids used in ubo core and<service_name>:prefix for notification ids used in services. - Use
ubo:prefix for icon ids used in ubo core and<service_name>:prefix for icon ids used in services.
Development
Setting up the development environment
Quick start (automated)
After cloning the repository, you can set up the whole development environment with a single script. It detects your platform (macOS or Raspberry Pi/Linux), installs the required tooling (uv, buf, git-lfs, node), and bootstraps the project (virtual env, dependencies, protobuf, web app). It is safe to re-run and never requires sudo on the Raspberry Pi (run it as the ubo user):
Useful flags: --tools-only (install tools, skip project bootstrap), --skip-web (skip the web app build), --help. Pinned tool versions can be overridden via environment variables (e.g. NODE_VERSION=22 ./scripts/setup-dev.sh).
When it finishes, it prints the command to run the app in development mode.
Manual setup
To set up the development environment manually, you need to have uv installed.
First, clone the repository (you need to have git-lfs installed):
git clone https://github.com/ubopod/ubo_app.git git lfs install git lfs pull
In environments where some python packages are installed system-wide, like Raspberry Pi OS, you need to run the following command to create a virtual environment with system site packages enabled:
uv venv --system-site-packages
Then, navigate to the project directory and install the dependencies:
Next, you need to compile protobuf files and build the web application. You only need to do this once or whenever you update store actions/events or the web app. Please refer to Generating the protobuf files and Building the web application sections for the steps.
Now you can run the app with:
HEADLESS_KIVY_DEBUG=true uv run ubo
Run the app on the physical device
Add ubo-development-pod host in your ssh config at ~/.ssh/config:
Host ubo-development-pod
HostName <ubopod IP here>
User pi
~/.ssh/authorized_keys) so that you don't need to enter the password each time you ssh into the device. If you decide to use password instead, you need to reset the password for Pi user first using the GUI on the device by going to Hamburger Menu -> Settings -> System -> Users and select pi user
Before you deploy the code onto the pod, you have to run the following command to generate the protobuf files and compile the web application.
Generating the protobuf files
Please make sure you have buf library installed locally. If you are developing on a Mac or Linux, you can install it using Homebrew:
brew install bufbuild/buf/buf
Then, run the following command to generate the protobuf files whenever an action or
This is a shortcut for running the following commands:
uv run poe proto:generate # generate the protobuf files based on the actions/events defined in python files uv run poe proto:compile # compile the protobuf files to python files
Building the web application
If you are running it for the firt time, you first need to install the dependencies for the web application:
cd ubo_app/services/090-web-ui/web-app npm install # Only needed the first time or when dependencies change
Then, you need to compile the protobuf files and build the web application:
cd ubo_app/services/090-web-ui/web-app
npm run proto:compile
npm run buildIf you are modifying web-app typescript files, run npm run build:watch and let it stay running in a terminal. This way, whenever you modify web-app files, it will automatically update the built files in dist directory as long as it’s running.
If you ever add, modify or remove an action or an event you need to run poe proto and npm run proto:compile again manually.
Then you need to run this command once to set up the pod for development:
uv run poe device:deploy:complete
After that, you can deploy the app to the device with:
To run the app on the device, you can use either of these commands:
uv run poe device:deploy:restart # gracefully restart the app with systemctl uv run poe device:deploy:kill # kill the process, which will be restarted by systemd if the service is not stopped
Running unit tests
Pure unit tests for store logic, navigation, and view computation can be run locally without Docker, Kivy, or Raspberry Pi hardware:
This runs all tests in tests/store/ and tests/navigation/ (~285 tests, takes ~3 seconds).
To run them inside Docker:
uv run poe docker:test:unit
Running tests on desktop
Easiest way to run tests is to use the provided Dockerfiles. To run the tests in a container, you first need to create the development images by running:
uv run poe build-docker-images
Then you can run the tests with:
docker run --rm -it --name ubo-app-test -v .:/ubo-app -v ubo-app-dev-uv-cache:/root/.cache/uv ubo-app-test
You can add arguments to the pytest command to run specific tests like this:
docker run --rm -it --name ubo-app-test -v .:/ubo-app -v ubo-app-dev-uv-cache:/root/.cache/uv ubo-app-test -- <pytest-args>
For example, to run only the tests in the tests/integration/test_core.py file, you can run:
docker run --rm -it -v .:/ubo-app -v ubo-app-dev-uv-cache:/root/.cache/uv -v uvo-app-dev-uv-local:/root/.local/share/uv -v ubo-app-dev-uv-venv:/ubo-app/.venv ubo-app-test
To pass it command line options add a double-dash before the options:
docker run --rm -it -v .:/ubo-app -v ubo-app-dev-uv-cache:/root/.cache/uv -v uvo-app-dev-uv-local:/root/.local/share/uv -v ubo-app-dev-uv-venv:/ubo-app/.venv ubo-app-test -- -svv --make-screenshots --override-store-snapshots --override-window-snapshots
Useful pytest options for snapshot testing:
--make-screenshots- Generate PNG screenshot files alongside hash files. When a test fails due to snapshot mismatch, this creates.mismatch.pngfiles showing the actual rendered output for debugging.--override-window-snapshots- Update window snapshot hash files to match current output (use after verifying the visual changes are correct).--override-store-snapshots- Update store snapshot files to match current state.
For example, to debug a failing snapshot test:
docker run --rm -it -v .:/ubo-app -v ubo-app-dev-uv-cache:/root/.cache/uv ubo-app-test -- --make-screenshots tests/integration/
Then check the generated .mismatch.png files in tests/integration/results/ to see what changed.
You can also run the tests in your local environment by running:
Running tests on the device
You need to install dependencies with following commands once:
uv run poe device:test:copy uv run poe device:test:deps
Then you can use the following command each time you want to run the tests:
Running linter
To run the linter run the following command:
To automatically fix the linting issues run:
Running type checker
To run the type checker run the following command on the pod:
If you prefer to run typecheck on the local machine, clone stubs repository (which includes typing stubs for third-party packages) and place the files under typings directory. Then run poe typecheck command.
Adding new services
It is not documented at the moment, but you can see examples in ubo_app/services directory.
create_task function imported from ubo_app.utils.async_ to create a new task. Using await inside async functions is always fine and doesn't need any special attention.
create_task imported from ubo_app.utils.async_ is alright.
QR code
In development environment, the camera is probably not working, as it is relying on picamera2, so it may become challenging to test the flows relying on QR code input.
To address this, the camera module, in not-RPi environments, will try reading from /tmp/qrcode_input.txt and /tmp/qrcode_input.png too. So, whenever you encounter a QR code input, you can write the content of the QR code in the text file path or put the qrcode image itself in the image file path and the application will read it from there and continue the flow.
Alternatively you may be able to provide the input in the web-ui (needs refresh at the moment) or provide it by InputProvideAction in grpc channel.
🛠️ Hardware
This section presents different hardware or emulation options that you can use with Ubo app.
Emulation
To remove barriers to adoption as much as possible and allow developers use Ubo app without hardware depenencies, we are currently emulating the physical GUI in the browser.
The audio playback is also streamed through the broswer.
We plan to emulate camera and microphone with WebRTC in the future.
However, other specialized hardware components (sensors, infrared rx/tx, etc) cannot be emulated.
Ubo Pod
Ubo pod is an open hardware that includes the following additional hardware capabilities that is supported by Ubo app out of the box:
- A built-in minimal GUI (color LCD display and keypad)
- Stereo microphone and speakers (2W)
- Camera (5MP)
- LED ring (27 addressable RGB LEDs)
- Sensors
- Ambient light sensor
- Temperature sensor
- STEMMA QT / Qwiic connector for additional sensors
- Infrared
- Receiver (wideband)
- Transmitter (4 high power LEDs)
- 2 full HDMI ports
- Power/reset button
- NVMe storage (Pi 5 only)
For more information on hardware spec, see the website getubo.com.
This is an open hardware. You can access mechanical design files here and electrical design files here.
DIY path
You can also buy different HATs from different vendors to DIY the hardware. Future plans include supporting USB microphone, speakers, cameras as well with headless setup.
This however involves having to purchase multiple HATs from different vendors and the process may not be the easiest and most frictionless. You may have to dig into the code and make some small changes to certain setups and configurations.
I made the table below that shows options for audio, cameras, and other sub-components:
| Function | Options |
|---|---|
| Audio | Respeaker 2-Mic Audio HAT, Adafruit Voice Bonnet, Waveshare WM8960 Hat, Adafruit BrainCraft HAT |
| Speakers | 1 or 2W, 8 Ohm |
| Camera | Raspberry Pi Camera Modules V1.3, V2, or V3 |
| LCD (also emulated in the browser) | 240x240 TFT Display, Adafruit BrainCraft HAT |
| Keypad | AW9523 GPIO Expander |
| LED ring | Neopixel LED ring |
| Ambient Light Sensor | VEML7700 Lux Sensor |
| Temperature Sensor | PCT2075 Temperature Sensor |
🏗️ Architecture
The architecture is fundamentally event-driven and reactive, built around a centralized Redux store that coordinates all system interactions through immutable state updates and event dispatching.
Services communicate exclusively through Redux actions and events rather than direct method calls, with each service running in its own isolated thread while subscribing to relevant state changes and events.
The system uses custom event handlers that automatically route events to the appropriate service threads, enabling reactive responses to state changes across hardware interfaces, user interactions, and system events.
This reactive architecture allows components like the web UI to subscribe to display render events and audio playback events in real-time, creating a responsive system where changes propagate automatically through the event stream without tight coupling between components.
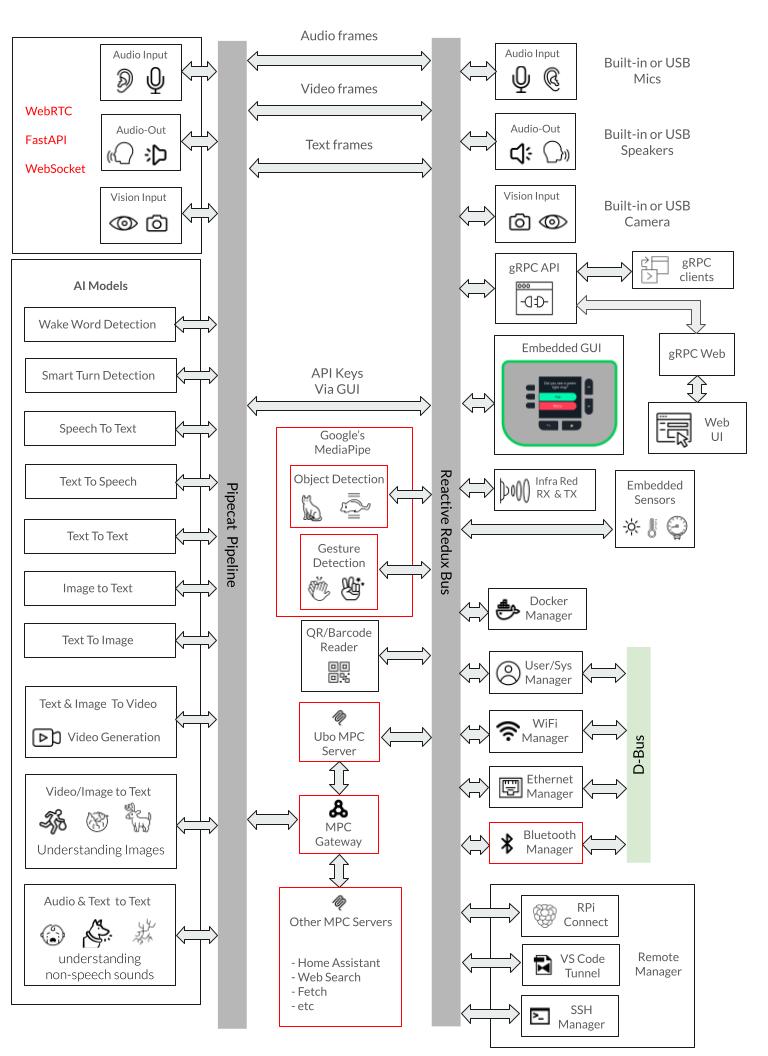
The following is a summary of key architecture components.
-
Redux-Based State Management: Central
UboStoremanages all application state through immutable state trees, with each service contributing its own state slice (audio, camera, display, docker, wifi, etc.) and communicating via actions and events. -
Modular Service Architecture: 21+ core services run in isolated threads with dedicated event loops, organized by priority (
000-0xxfor hardware,030-0xxfor networking,080-0xxfor applications,090-0xxfor UI), each with their own setup.py, reducer.py, and ubo_handle.py files. -
Hardware Abstraction Layer: Comprehensive abstraction for Raspberry Pi components (ST7789 LCD, WM8960 audio, GPIO keypad, sensors, camera, RGB ring) with automatic environment detection and mock implementations for development on non-RPi systems.
-
Multi-Interface Access: Supports web browser access (port 4321 for direct bootstrap/recovery, Envoy's gRPC-web frontend port for the full live UI), gRPC API (port 50051), SSH access, and direct hardware interaction, with a web UI service providing hotspot configuration and dashboard functionality.
-
System Integration: Integrates with
systemdandd-busfor service management, Docker for container runtime, andNetworkManagerfor network configuration, with a separate system manager process handling root-privilege operations via Unix sockets.
Notes:
The application follows a structured initialization sequence through ubo_app/main.py and uses the uv package manager for dependency management.
The architecture supports both production deployment on Raspberry Pi devices and development environments with comprehensive mocking systems, making it suitable for cross-platform development while maintaining hardware-specific capabilities.
DeepWiki pages you might want to explore:
Notable dependencies
Here are the key dependencies organized by category:
Core Framework & State Management
python-redux: Redux-based state management system for the entire appubo-gui: Custom GUI framework built on Kivy for the user interfaceheadless-kivy: Headless Kivy implementation for supporting LCD display over SPI
Hardware Control (Raspberry Pi)
adafruit-circuitpython-rgb-display: ST7789 LCD display driveradafruit-circuitpython-neopixel: RGB LED ring controladafruit-circuitpython-aw9523: I2C GPIO expander for keypadadafruit-circuitpython-pct2075: Temperature sensor driveradafruit-circuitpython-veml7700: Light sensor driverrpi-lgpio: Low-level GPIO access for Raspberry Pigpiozero: GPIO abstraction layerrpi-ws281x: WS281x LED strip control librarypyalsaaudio: ALSA audio interface for Linux audio controlpulsectl: PulseAudio control for audio managementsimpleaudio: Simple audio playback functionality
Voice AI
piper-tts: Text-to-speech synthesis enginevosk: Speech recognition librarypvorca: Picovoice Text-to-speech synthesis enginepipecat-ai: framework for building real-time voice and multimodal conversational agents
Networking & Services
aiohttp: Async HTTP client/server for web servicesquart: Async web framework for the web UI servicesdbus-networkmanager: NetworkManager D-Bus interface for WiFinetifaces: Network interface enumerationdocker: Docker API client for container management
QR Codes
pyzbar: QR code and barcode scanning library
System Utilities
psutil: System and process monitoring utilitiesplatformdirs: Platform-specific directory pathstenacity: Retry logic and error handlingfasteners: File locking and synchronization
Development Environment Abstraction
python-fake: Mock hardware components for development
gRPC Communication
betterproto: Protocol buffer compiler and runtime
Notes:
The project uses platform-specific dependencies with markers like platform_machine=='aarch64' for Raspberry Pi-specific libraries and sys_platform=='linux' for Linux-only components. The python-fake library enables development on non-Raspberry Pi systems by providing mock implementations of hardware components.
🗺️ Roadmap
This is a tentative roadmap for future features. It is subject to change.
- Emulation for camera and microphone inside browser (requires SSL certificate for browser permissions)
- Allow users to pick their soundcard for play and record via GUI (e.g. USB audio)
- Allow users to pick their camera for video via GUI (e.g. USB camera)
- Option to turn Ubo pod into a voice satellite with wyoming protocol with Home Assistant
- Make all on-board sensors and infrared discoverable and accessible by Home Assistant
- Expose
pipecat-aipreset pipeline configuration via GUI - Support for Debian Trixie (13)
If you have any suggestions or feature requests, please open a discussion here.
🔒 License
This project is released under the Apache-2.0 License. See the LICENSE file for more details.