All Posts
Accelerating the next phase of physical AI
Millions of robots are operating in the world today. Billions more are coming across factories, warehouses, laboratories, restaurants, farms, homes, and space. They will share one need: intelligence that can understand and act in the physical world.
2 min read June 4, 2026

Going Beyond World Models & VLAs
Goals are more powerful than methods. We share our perspective on why GEN-1 is trained from scratch — and what lies beyond VLAs and world models.
5 min read April 7, 2026
GEN-1 / Scaling Embodied Foundation Models to Mastery
We've created GEN-1, our latest milestone in scaling robot learning — the first general-purpose AI model that crosses a new performance threshold: mastery of simple physical tasks.
14 min read April 2, 2026
The Real Breakthrough Behind Our GTC Demo
We ran a live demo at GTC last week, but the real story is how quickly we got it running. GEN-0 has given us a step-change in the speed of generalization.
4 min read March 24, 2026
The Dark Matter of Robotics: Physical Commonsense
It's the reactive, closed-loop intelligence behind interacting in the physical world — an intuition of physics, compiled into reflex and muscle memory. What's been elusive in robotics may, for the first time, emerge from scaling.
6 min read January 29, 2026
GEN-0 / Embodied Foundation Models That Scale with Physical Interaction
We're introducing GEN-0, a new class of embodied foundation models built for multimodal training directly on high-fidelity raw physical interaction.
12 min read November 4, 2025
The Robots Build Now, Too
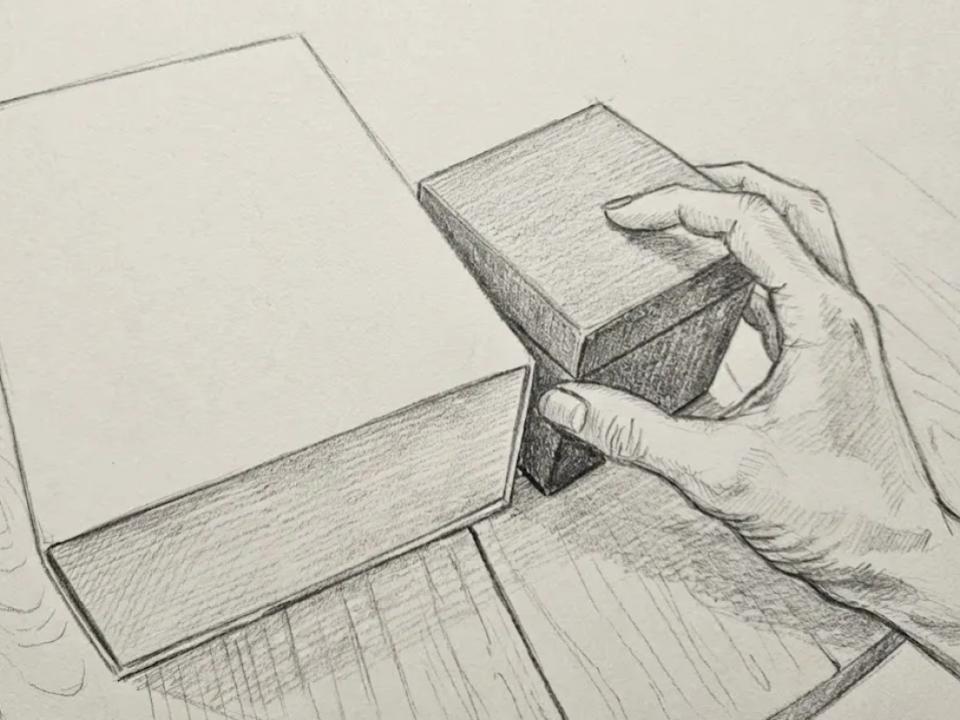
One-shot assembly is one of our new internal evaluation tasks: you build a small Lego structure, place it in front of the robot, and the robot builds copies of it.
3 min read September 24, 2025
Research Preview
A glimpse of what we're building at Generalist — end-to-end neural networks for dexterous sensorimotor policies across different embodiments, environments, and physical interactions.
3 min read June 17, 2025