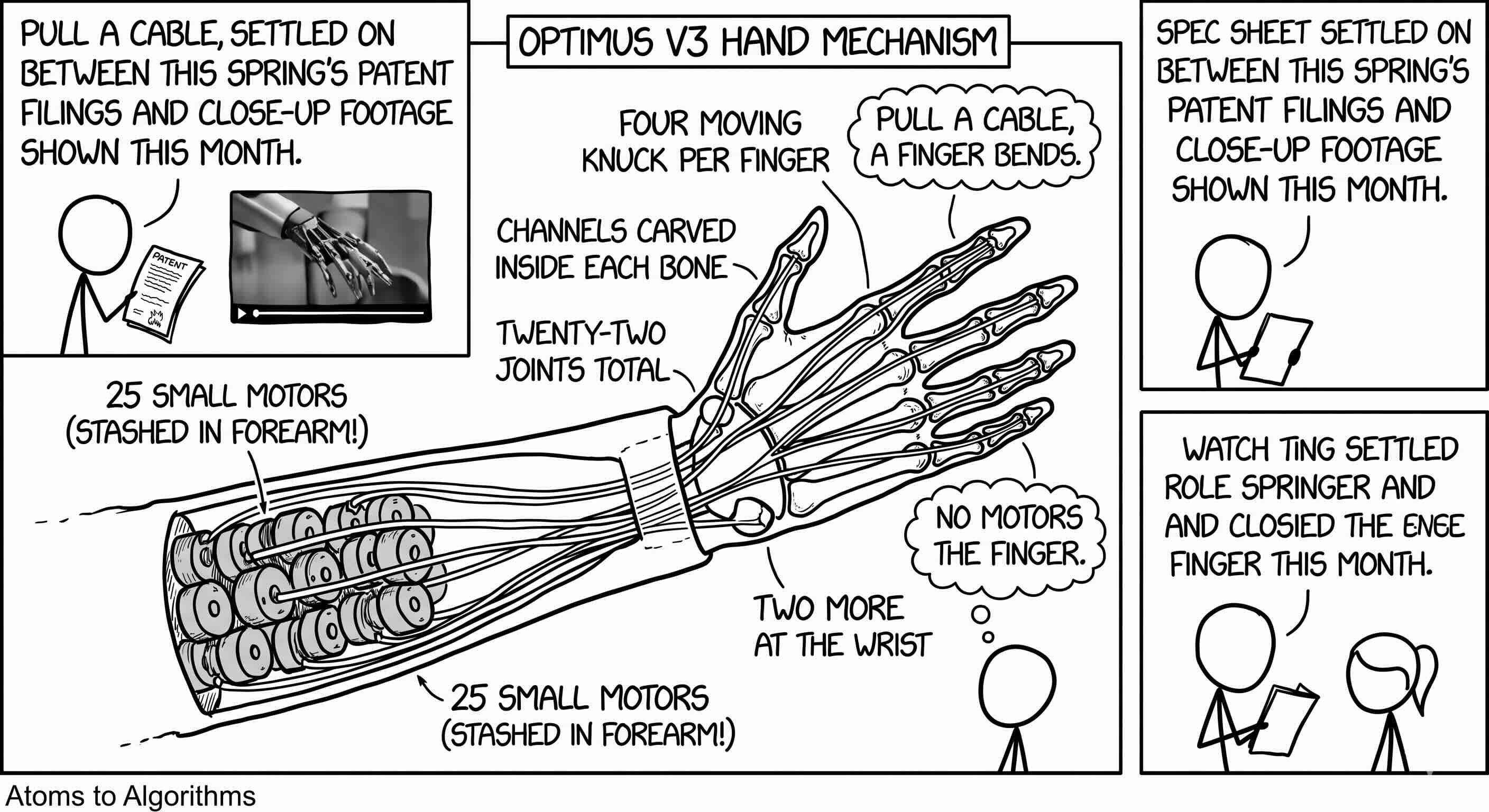
A 22-joint hand driven by 25 small motors stashed inside the forearm. That is roughly the spec sheet Tesla settled on for the Optimus V3 hand between this spring’s patent filings and the close-up footage shown this month. Four moving knuckles per finger, two more at the wrist, twenty-two joints total, none of them with a motor sitting inside the finger. The motors live up the arm. Thin steel cables, three per finger, snake through the wrist into channels carved inside each bone. Pull a cable, a finger bends.
This is the last issue of foundations week. For four days we treated the joint count as a quiet number in the math. Today we ask why a hand needs more than twenty joints when an industrial arm gets along with six, and why the answer involves a thirty-year-old idea from human-hand neuroscience.
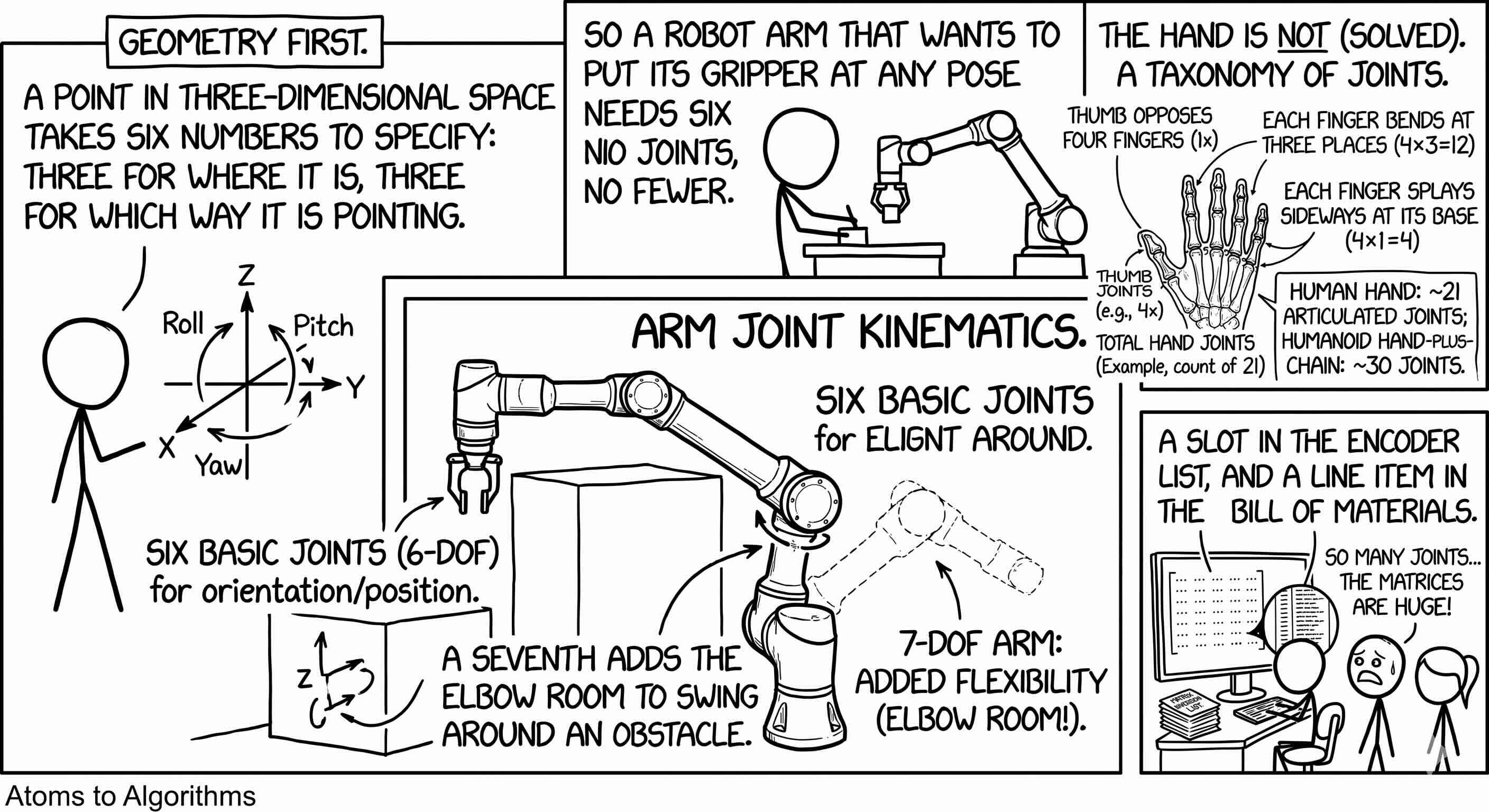
Geometry first. A point in three-dimensional space takes six numbers to specify: three for where it is, three for which way it is pointing. So a robot arm that wants to put its gripper at any pose needs six joints, no fewer. A seventh adds the elbow room to swing around an obstacle. Almost every cobot arm on the market (Universal Robots, Franka Panda, KUKA) ships with six or seven joints. The arm is, as engineers like to say, solved.
The hand is not. A thumb opposes four fingers, each finger bends at three places, and each finger splays sideways at its base. A human hand has 21 articulated joints; a humanoid hand-plus-arm chain runs near thirty. Each joint is a row in every matrix the controller has to invert, a slot in the encoder list, and a line item in the bill of materials.
Now the trick. In 1998, Marco Santello and his coauthors at Arizona State recorded fifteen joint angles on volunteers’ hands while the volunteers mimed grasps for fifty-seven everyday objects. They ran a statistical procedure called principal component analysis on the data, looking for whether all fifteen joints really moved independently. They did not. The first two coordinated patterns accounted for about 84% of the variance across every grasp tested. The first three captured 90%. The brain, it turned out, was not commanding twenty-one joints one at a time. It was commanding a small handful of patterns, and the joints followed.
Engineers stole the result. The technical name is underactuated hand design. Pick a small bank of motors, say eight or ten, and route their cables through the hand so that one motor moves several joints together in a useful coordinated pattern. Compliance and contact with the object you are grasping fill in any local adjustments. The NYU group’s RUKA hand drives fifteen joints from a forearm motor bank for about $1300 in parts and can power-grasp objects above six kilograms. A December 2025 paper out of arXiv shows a single motor pulling a pair of cables across a joint, acting like a biological muscle pair. A diffusion policy from a separate group runs sixteen joints directly in cable-length space, with no per-joint inverse-kinematic solver in the loop at all.
Tesla’s Optimus V3 stays conservative at the actuator count: roughly twenty-five forearm motors for the twenty-two joints, with three cables per finger plus thumb-and-wrist extras. That is not a dramatic mechanical reduction. The deeper compression happens upstream, in the policy. NVIDIA’s newly released GR00T N1.7 foundation model claims twenty-two-DoF dexterous control straight out of the box, pretrained on twenty thousand hours of egocentric human video. The model emits a low-dimensional intent and the mechanism, plus the contact physics of whatever the hand is touching, expand that intent back into the full joint vector. Mechanical synergy plus policy synergy, stacked. Sunday robotics is doing kind of something similar, I am hoping to cover it in future posts, so keep reading daily here.
Three reasons humanoid OEMs went with cables and forearm motors instead of motors inside the fingers. Mass: a thirty-gram motor at a fingertip swings several Newton-meters of torque at the shoulder. Power: a hand full of motors burns watts even when standing still; cables, idle, burn nothing. Cost: a steel cable and a guided sheath are cheaper than a motor with an encoder. The trade-off is that cables stretch, the inner control loop loses bandwidth, and friction is nonlinear. Every recent tendon-hand paper has a learned compensator buried inside the controller to handle exactly that. It is nothing but straight out of science fiction what we have accomplished so far.
RUKA-v2 (NYU, March 2026 on arXiv) adds a two-joint wrist and finger abduction to the original open-source tendon hand, cutting task completion time by half and boosting success rate by twenty-one percent over the first generation, at roughly the same $1.3k cost in parts. The closest thing to a reference design that a hobbyist or researcher can build today. You can see it in example link here.
Antagonistic Bowden-Cable Actuation (arXiv, December 2025) shows a single motor driving a pair of opposed cables across a finger joint, producing two-direction motion from one actuator. Old idea in biology, newly clean in a robotics paper.
NVIDIA Isaac GR00T N1.7 (released in early access in May 2026) is the first humanoid foundation model that treats finger-level control as a first-class capability. NVIDIA reports a log-linear scaling law: going from one thousand to twenty thousand hours of pretraining video more than doubles average task completion. Quoted from the announcement: “twenty-two-DoF dexterous control out of the box.”
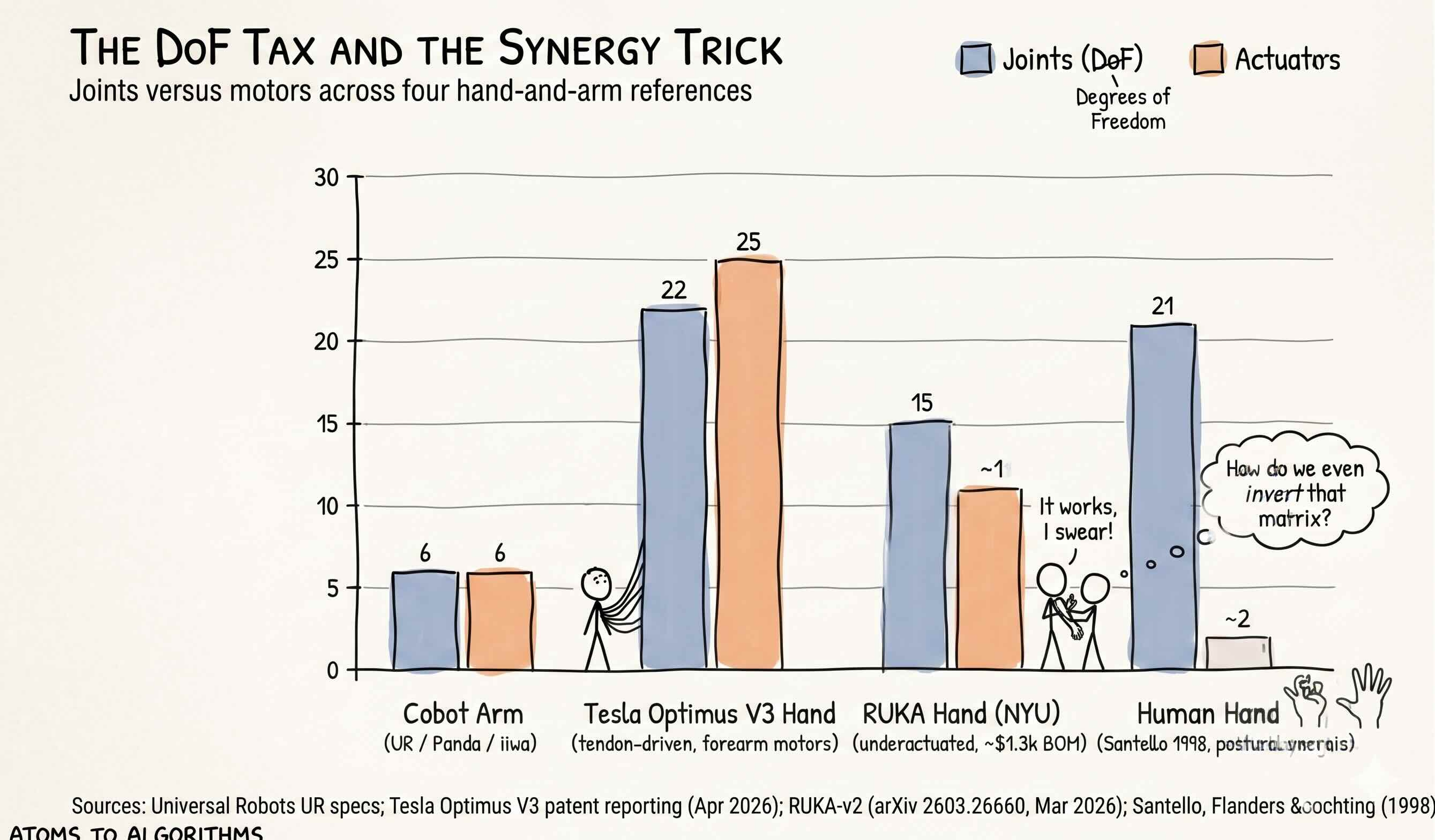
Visualization shows three bars on a shared axis. A cobot arm with six joints. A humanoid hand with twenty-two. A human reference at twenty-one to twenty-seven. Under each bar, the actuator count after the synergy trick gets applied: six motors for the arm (nothing to compress), about twenty-five for Tesla’s V3 hand, and around eleven for RUKA’s fifteen underactuated joints. The visible gap between joint count and motor count is where the synergy lives. Whatever count of joints you see at the top, the controller and the cable layout collapse the underlying motor count to a smaller number. The hand is dexterous despite the mechanism, not because of it.
A closing thought worth holding. Robotics writing tends to wave at humanoid demos as if dexterity were free. The actual price is the synergy trick. Without it, every additional joint costs a motor, an encoder, a BOM line, and a row in every matrix the controller computes. With it, an emergent fact from human motor neuroscience makes a 22-DoF hand buildable. In the next post, we leave the hand behind and ask what it can sense. Perception, with the depth-sensing trio: passive stereo, structured light, and time-of-flight, and the surprisingly different prices each pays for the privilege of seeing distance.
Subscribe for tomorrow’s read, we’re walking the robotics supply chain from atoms to algorithms, one weekday at a time.
Sources: