Boston Dynamics unveiled the production version of its electric Atlas robot at CES this year with 56 degrees of freedom, most of them joints that can rotate a full 360°. Its torso spins past the human limit on purpose. Its head turns without the body following. Hyundai is the first customer, Google DeepMind the second. A human body has roughly 230 articulated joints. Atlas has fifty-six. The robot is not trying to be a human. It is a serial linkage of revolute axes deliberately engineered to make a hand reach a pose.
In previous posts, we walked the supply chain: rare-earth magnets, gearboxes, vision and touch, the chip and the watt budget. This week we leave the supply chain and start on motion. The bottom layer is kinematics: the geometric math that connects joint angles to the position and orientation of the hand. Forward is easy. Inverse is hard. The whole reason a humanoid hand is harder than a humanoid leg is not the number of motors. It is the inverse-kinematics math of twenty-one independent finger joints.
A robot arm is, in mathematical terms, a chain of small rotations applied in order. Each joint contributes one rotation around its own axis, set by a single angle. Give the arm a list of angles, one per joint, and a deterministic calculation tells you exactly where the hand is and which way it’s pointing. That calculation, called forward kinematics, runs cheaply and quickly. It is the routine job of every joint controller in every robot in every factory.
The hard direction is the other one. Tell the arm “I want my hand here, pointing this way,” and ask it to figure out the list of joint angles that put the hand in that pose. That is inverse kinematics. There is no single recipe. For some arm designs it can be solved with a closed-form equation; for most arms in production today it is solved iteratively, by guessing a starting configuration and nudging it toward the goal one small step at a time.
Two numbers explain why the problem ramps up so quickly with degrees of freedom.
Six. A pose in three-dimensional space is six numbers: three for position and three for orientation. To reach any pose with any orientation, an arm needs at least six independent joints. Industrial arms (Universal Robots, ABB, KUKA’s classic line) use exactly six because that is the cheapest way to span all reachable poses. Many collaborative arms add a seventh joint specifically so the elbow can swing around an obstacle while the wrist stays on target.
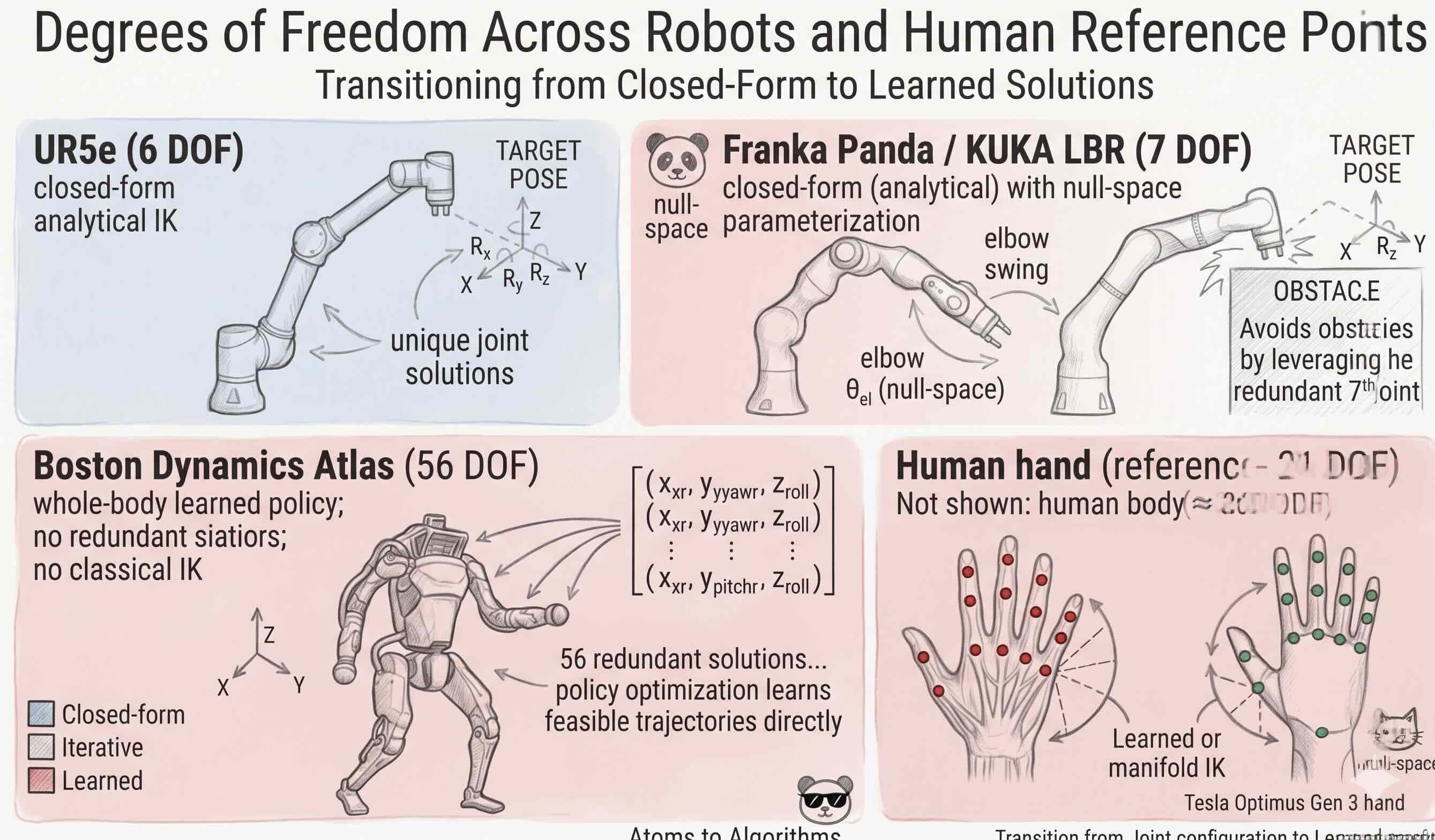
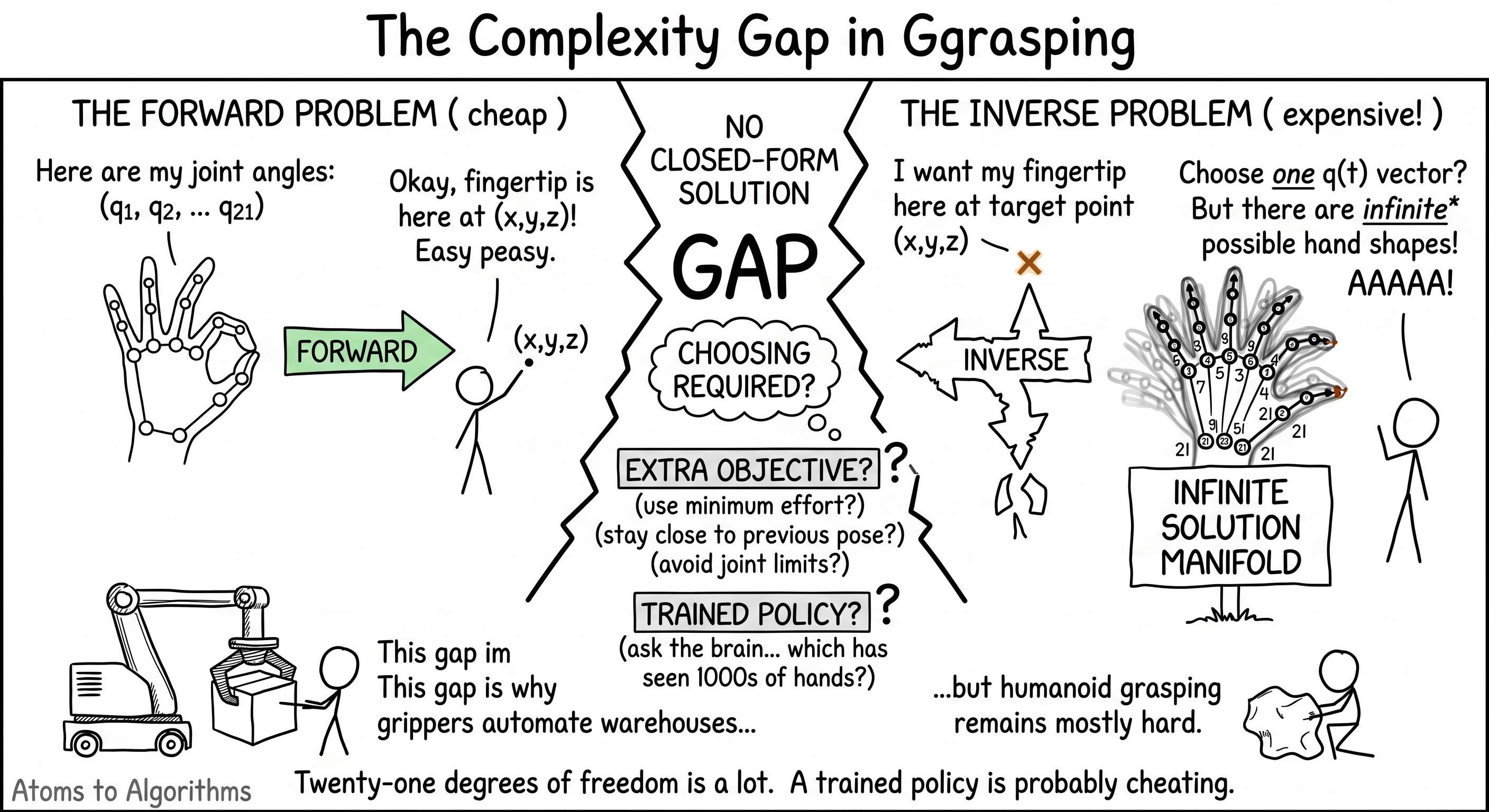
Twenty-one. A human hand has about 21 independent degrees of freedom across the wrist, palm, fingers, and thumb. The forward direction (here are my joint angles; where is my fingertip?) is still cheap. The inverse direction (here is where I want my fingertip; what joint angles get it there?) is not cheap at all. There is no closed-form equation. For most desired fingertip configurations, an infinite family of joint angles will produce it, and choosing one requires either an extra objective (use minimum effort, stay close to your previous configuration, avoid joint limits) or a trained policy that has seen thousands of human hands choosing for themselves. That gap, between the cheap forward problem and the hard inverse one, is the entire reason warehouse picking with a vacuum gripper is mostly automated and humanoid grasping is not.
Two architectures are fighting for the inverse-kinematics future right now. The classical approach, fifty years old and very well engineered, lives in libraries like MoveIt and TRAC-IK and inside the proprietary motion stacks of KUKA, Fanuc, ABB, and Boston Dynamics. The 2026 approach is learned: take pixels and a goal as input, emit joint commands as output, skip the explicit math entirely. NVIDIA’s Isaac GR00T N1.6, released in January, runs this way (before you try to ask and search if GR00T has any connection wit Groot from guardians of the galaxy? the answer is no, they have no connection). Toyota Research’s Large Behavior Models do too. So does Tesla’s hand policy on the new Optimus. The bet is that the kinematics problem becomes obsolete the way handwritten computer-vision pipelines became obsolete after deep learning, and that the value migrates to whoever owns the model weights and the data flywheel.
Boston Dynamics put production Atlas into the wild. At CES 2026, the company announced 56-degree-of-freedom electric Atlas, deployed at Hyundai’s Georgia Metaplant. The torso and waist rotate further than a human’s by design, which gives the robot configurations that an anthropomorphic constraint set would block. (Boston Dynamics)
Tesla’s Optimus hand patent revealed the engineering inside. April 2026 filings show 22 degrees of freedom per hand driven by 25 actuators (a 4.5× jump from Gen 2), with almost all actuators housed in the forearm and routed through Bowden-style cables to the finger joints. The practical control problem becomes selecting a grasp from a low-dimensional learned manifold rather than solving 22-DOF inverse kinematics from scratch every time. (Tesla North)
Diffusion is starting to replace iterative IK solvers. A January 2026 revision of IKDiffuser (an arXiv paper that has been quietly polished since 2025) trains a diffusion model to generate inverse-kinematics solutions across seven different robot platforms, and the headline result is that using it to warm-start a classical solver dramatically improves success rates on high-DOF redundant systems. The future of IK looks hybrid: generative model proposes, classical solver refines. (arXiv 2506.13087)
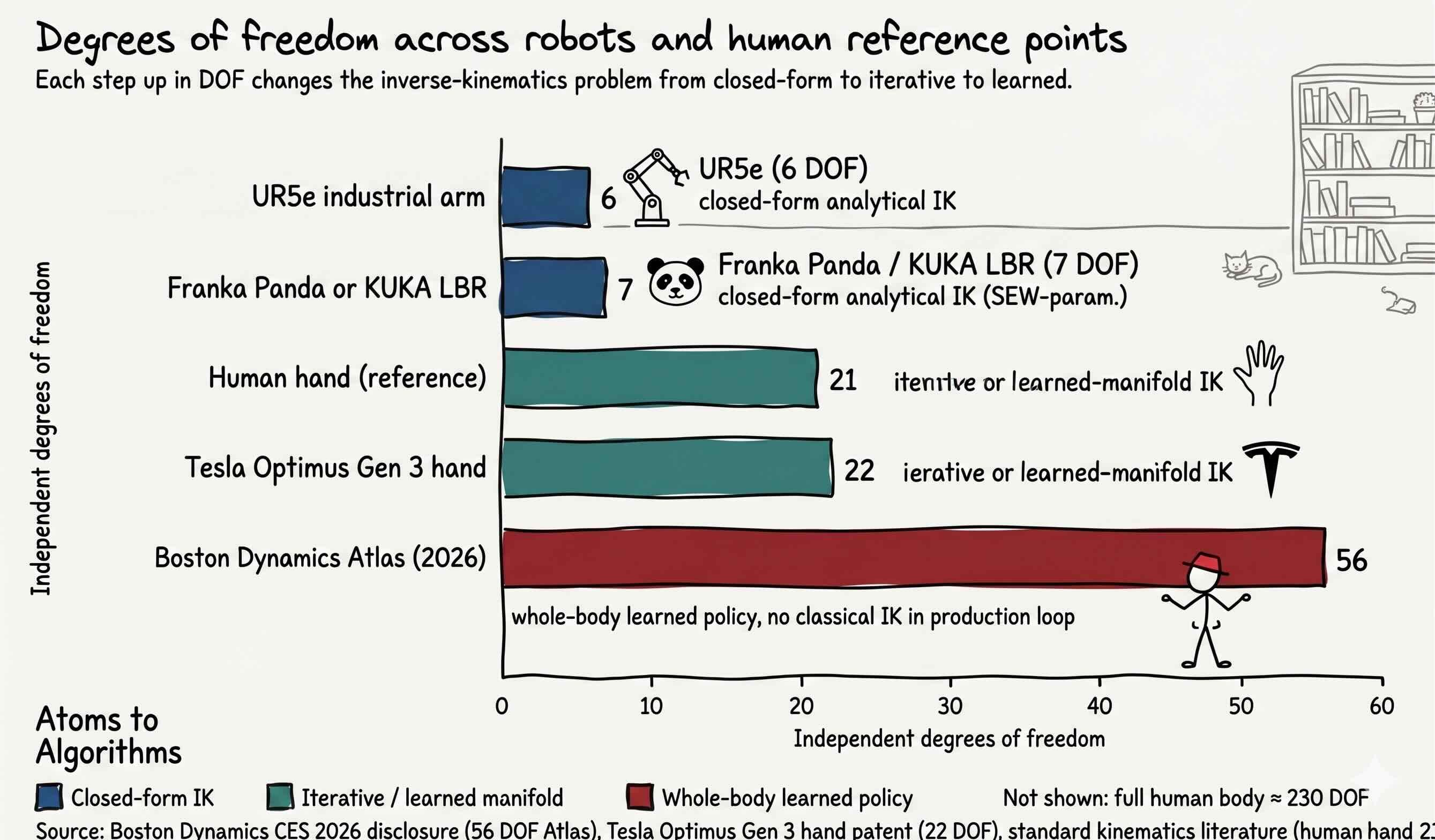
The visualization is a horizontal strip chart that compares degrees of freedom across canonical robots and two human reference points. A UR5e industrial arm has six joints. A Franka or KUKA collaborative arm has seven. A Tesla Optimus Gen 3 hand has twenty-two. A human hand has twenty-one. A full Atlas humanoid has fifty-six. A whole human body has roughly two-hundred-and-thirty. The takeaway is not that more is better. It is that as you climb past six, then seven, then into the double digits, the math of inverse kinematics changes character: from a clean closed-form solution to an iterative one, from iterative to learned, from a single answer to a distribution over answers.
Something I wonder overall, as even though Boston Dynamics in business for long time, they have produced mostly research oriented and good demo products. It’s recently that they have moved in more production grade and factory use robots and started getting reasonably serious revenue. Though new companies like figure, physical intelligence and others have taken good software lead due to AI from 2024 to 2026, it would be interesting to see if Boston Dynamics able to keep up and innovate itself to stay relevant and get its fair dues of years of research. It will sure be hard task for new management, as their previous CEO has retired recently and CFO has been put in-charge of the company.
Today we drew the foundation. Tomorrow we go inside the iterative solver, because that is what almost every production robot in the world is actually using right now. We will walk through the Jacobian matrix, the linear approximation that turns “I want my hand to move one centimeter forward” into a list of small joint-angle changes, and the damped-least-squares update rule that production code uses to apply it. The reason robots sometimes oscillate around a target instead of converging to it is hiding inside a single Greek letter in that update rule. Next posts we try to learn why.
Subscribe for next week’s read, we’re walking the robotics supply chain from atoms to algorithms, one weekday at a time.
Sources: