McKinsey published the cleanest public bill of materials for a 2026 humanoid robot last month, and the proportions are exactly the wrong shape for the story that “humanoid robotics is an AI story.” The AI runs on roughly an eighth of the bill. The mechanical content claims more than half.
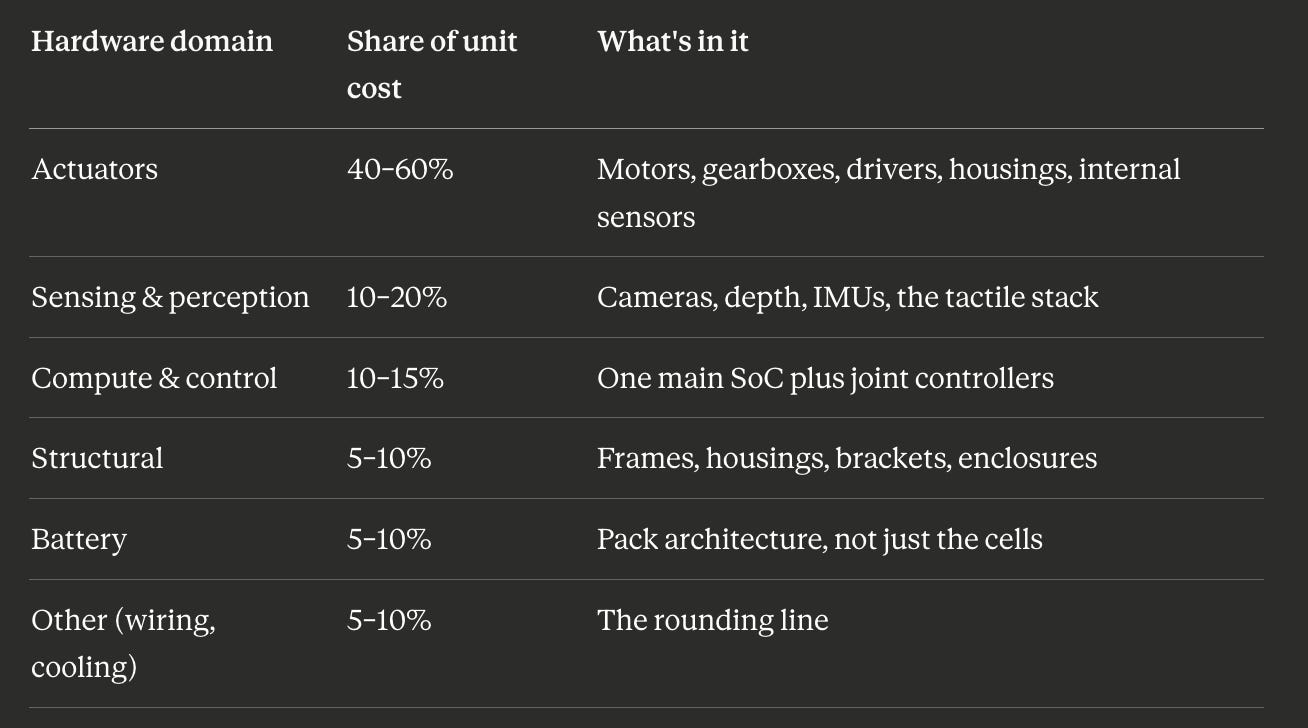
A 2026 humanoid costs $30,000 to $150,000 to assemble. (Almost) Half goes to actuators; inside each actuator, half goes to the reduction gearbox alone. That makes the gearbox the single largest line on the entire bill. That is wild share of percentage value in BOM.
Week 1 walked four bottlenecks: rare-earth magnets, strain-wave gearboxes, the gap between robot vision and robot touch, and the on-robot watt budget. Each maps to a specific line on the bill, and each line has at most a handful of suppliers worldwide who can ship at humanoid quality. The right question is not whether suppliers get paid. It is which of them sells a dollar of components for every humanoid that ships, regardless of which OEM wins. That is the picks-and-shovels question. Today we answer it.
Walk our four bottlenecks onto the bill.
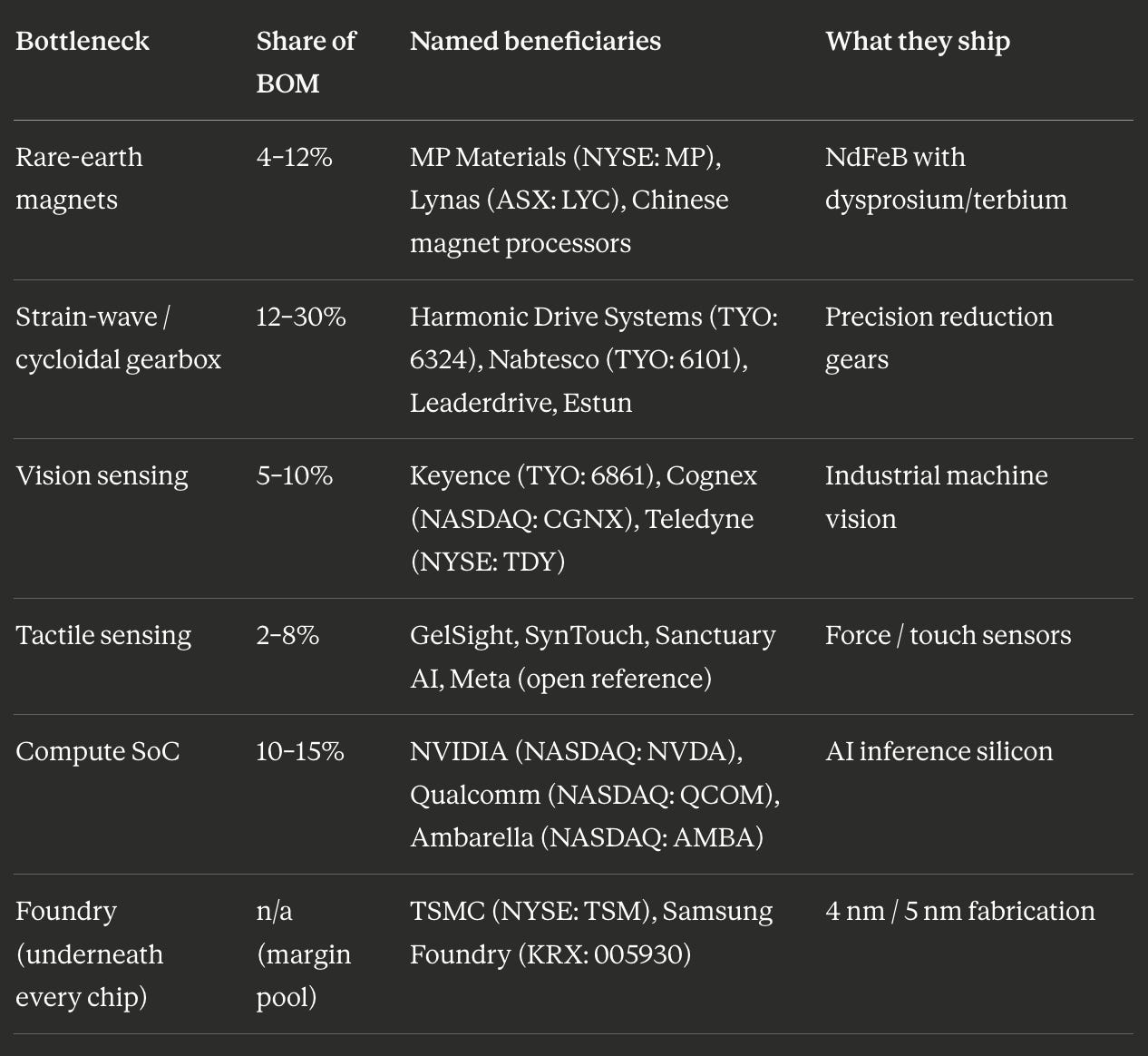
A typical humanoid carries 15 to 35 kilograms of high-temperature magnet and runs 14 to 25 strain-wave or cycloidal actuators on its rigid joints. Vision is a mature duopoly riding a smartphone-driven cost curve (lot of experimentation and product market fit is done). Touch is a standards race, and Meta’s open-sourcing of the Digit 360 may end up defining the reference the same way Android defined mobile OS. Beneath all of the silicon, two foundries make every chip on the bill - TSMC and Samsung.
So who actually compounds? Three criteria do the work: is there a real architectural moat, does humanoid volume add to the supplier’s base demand, and does customer concentration fall as more OEMs enter?

The strain-wave gearbox makers come out cleanest on all three tests. Same-dollar collectors keep getting paid, but their margins are dictated by a much larger adjacent market. Conditional plays could be 10x or zero, depending on who wins the standards fight.
McKinsey published the canonical bill of materials. (BOM) A 15-page report from McKinsey’s Industrials practice (April 17) is the first time a major firm has put named percentages on every line of a humanoid’s hardware spend, identified four high-risk component clusters (harmonic drives, planetary roller screws, six-axis force/torque sensors, tactile sensors), and called out the missing “engine maker” role no single supplier yet owns. (McKinsey)
Schaeffler keeps stepping into that “engine maker” slot. The German auto-supplier announced a partnership with Hexagon Robotics on April 23, won the Hermes Award at Hannover Messe on April 19, and is now the named supplier on four humanoid programs in eighteen months (Neura, Humanoid UK, Leju, and Hexagon). Schaeffler is publicly targeting a multi-million-euro humanoid order book by 2030. (Schaeffler)
Apptronik’s Apollo is now built by Jabil. Apptronik raised $520M in February at a $5B valuation, and its Apollo humanoid is being scaled into production by Jabil (NYSE: JBL), the world’s third-largest contract electronics manufacturer. The pattern matches Apple and Foxconn for the iPhone: the OEM keeps the design and the brand, the contract manufacturer absorbs the factory risk. If it works for humanoids, Jabil becomes the cleanest public-market read on the build-the-robot-at-scale thesis. (CNBC)
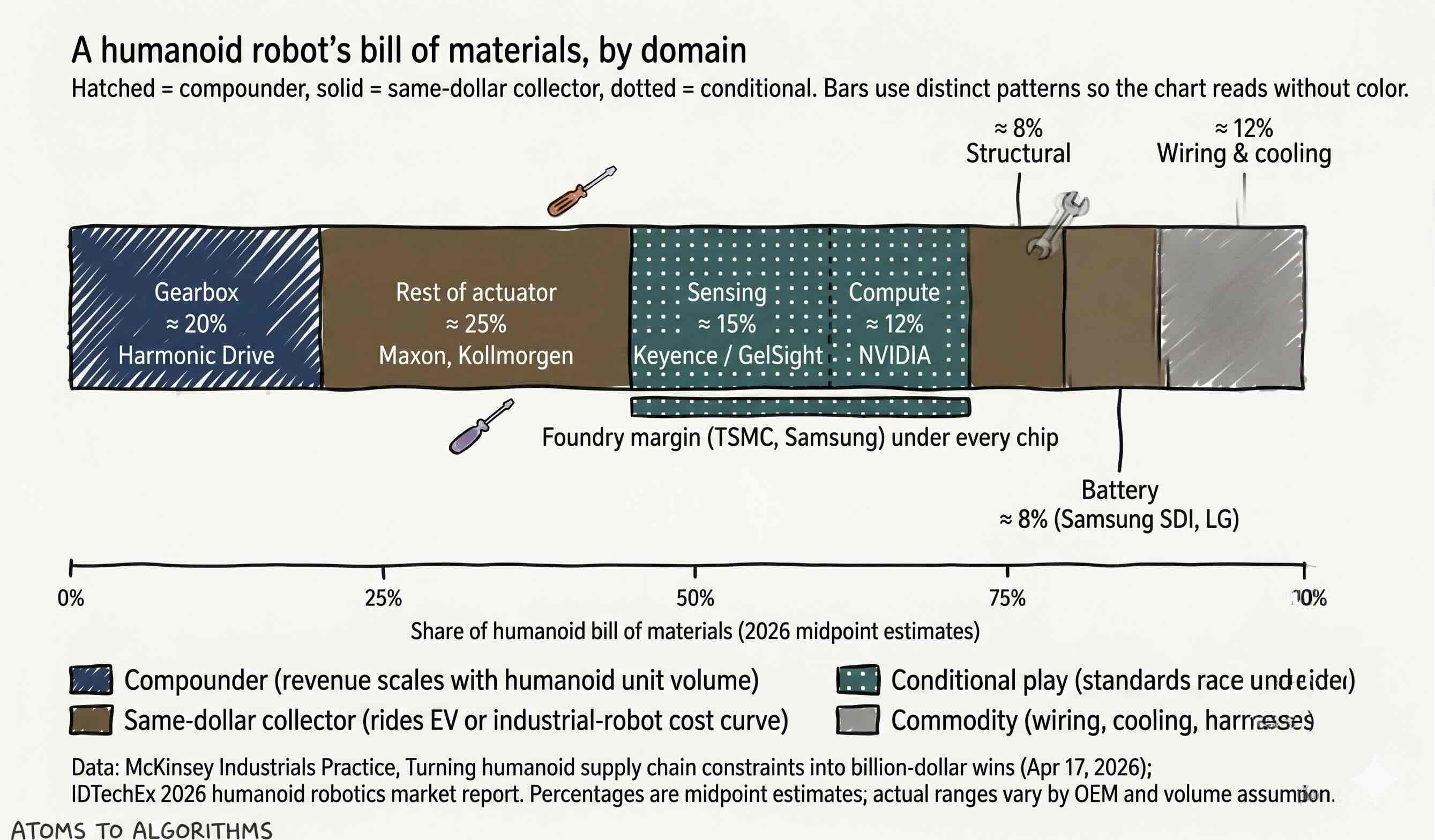
The is a horizontal bar of a humanoid’s bill of materials, each segment labeled by domain, percentage range, and primary supplier. The eye-catcher is the size of the gearbox line: bigger than the entire compute stack, bigger than the entire sensor suite, almost as big as everything that is not actuation. The supplier moat behind that bar is also the deepest in the whole chain. Pay attention to the largest bar.
We started with the rare earths that go into every magnet, walked through the gearboxes that translate motor torque into joint motion, mapped the gap between robot vision and robot touch, and ended on the watt budget that decides how big a brain a humanoid can carry. Today we drew all four onto one chart and named the suppliers most directly exposed to humanoid unit volumes.
Next posts we leave the supply chain and start on motion. The question we it answers: when you tell a robot arm “put your hand here,” what math translates “here” into a list of angles for each motor? The mechanism is forward kinematics, a chain of small rotations multiplied together, and the answer reveals why six joints are exactly the minimum a robot arm needs to reach any point in space with any orientation, and why a human hand has twenty-one and almost nobody can control all of them at once.
Subscribe for tomorrow’s read, we’re walking the robotics supply chain from atoms to algorithms, one weekday at a time.
Sources: